
Robotics and Artificial Intelligence
| Responsible | Nicolas Garcia Aracil |

RESEARCH SUMMARY
The Robotics & Artificial Intelligence research group of the Miguel Hernández University is a multidisciplinary group formed by specialists in various disciplines such as medicine, engineering, computer science, physiotherapy, occupational therapy, etc. The distinctive character of the group lies in the synergistic contribution of all its members to be able to face with guarantees of success the study of the complex interactions between human and artificial systems. Our main objectives focus on: 1) the design and development of innovative advanced robotic rehabilitation systems that improve the motor and cognitive recovery of people who have suffered acquired brain damage; 2) development of robotic systems that assist the elderly or people with different capacities in the realization of daily life activities; 3) the development of artificial intelligence algorithms to adapt the robotic behavior to the environment and/or to the user needs; 4) the research, development and application of novel multimodal intefaces; and 4) research and development different technologies for their application in different medical fields.

Final prototype of the European AIDE project
RESEARCH LINES
Line 1: Rehabilitation Robotics
Design, development and control of robotic devices for the rehabilitation of patients with loss of mobility due to different pathologies. Moreover, novel artificial intelligence algorithms to adapt the therapy to patient needs are developed and tested inside this research line.

Rubidium rehabilitation robotic platform
Line 2: Assistive Robotics
Research and development of new application of assistive robotic devices in home environment to assist elderly people or disabled people. In this line, we will explore the use of this robot assistant in other environments as well.

TIAgo robot platform in a simulated home environment
Line 3: Multimodal Interfaces
These systems consist of a combination of different technologies such as robotics, extended, virtual and augmented reality, artificial intelligence, and sensors to measure the physiological response of the user. Multimodal interfaces allow to assist the user providing more information or guidance but can also help patients during therapy.
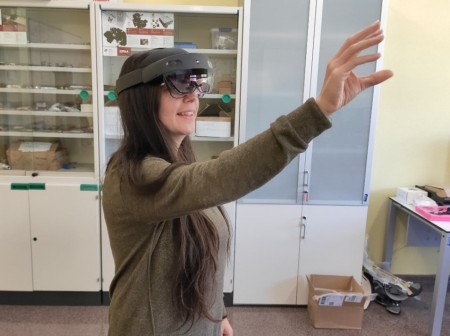
User operating the multimodal interface through the mixed reality Microsoft Hololens
Line 4: Robotic Exoskeletons
Design and manufacture of robotic exoskeletons for industrial, rehabilitation or assistance tasks.


Upper limb exoskeleton
Line 5: Medical technologies
Design of technological systems for medicine to ease the optimization of processes, protection of health professionals and support in medical tests. As an example, the team has developed a robotic sample extraction system for subsequent analysis and diagnosis in the laboratory (PCR).
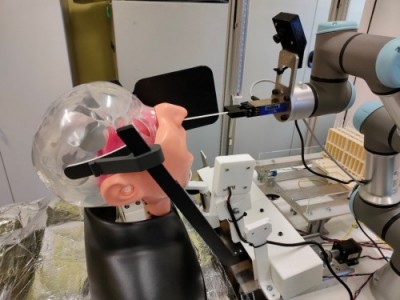
Robotic sample extraction system tests

J.A. Diez, V. Santamaria, M.I. Khan, J.M. Catalán, N. Garcia-Aracil, S.K. Agrawal
Exploring New Potential Applications for Hand Exoskeletons: Power Grip to Assist Human Standing
Sensors MDPI. 21(1):30 (2021).
M. Nann, F. Cordella, E. Trigili, C. Lauretti, M. Bravi, S. Miccinilli, J. M. Catalan, F. J. Badesa, S. Crea, F. Bressi, N. Garcia-Aracil, N. Vitiello, L. Zollo, S. R. Soekadar
Restoring Activities of Daily Living Using an EEG/EOG-Controlled Semiautonomous and Mobile Whole-Arm Exoskeleton in Chronic Stroke
IEEE Systems Journal (2020.
A. Blanco, J.M. Catalan, J.A. Díez, J.V. García, E. Lobato, N. Garcia-Aracil
Electromyography Assessment of the Assistance Provided by an Upper-Limb Exoskeleton in Maintenance Tasks
Sensors MDPI. 19-3391, pp.1-20 (2019).
J. A. Barios, S. Ezquerro, A. Bertomeu-Motos, M. Nann, F. J. Badesa, E. Fernandez, S. R. Soekadar, N. Garcia-Aracil
Synchronization of Slow Cortical Rhythms During Motor Imagery-Based Brain-Machine Interface Control
International Journal of Neural Systems. World Scientific. 29-5 (2019).
S. Crea, M. Nann, E. Trigili, F. Cordella, A. Baldoni, F. Javier Badesa, J. Ma. Catalán, L. Zollo, N. Vitiello, N. Garcia Aracil, S. R. Soekadar
Feasibility and safety of shared EEG/EOG and vision-guided autonomous whole-arm exoskeleton control to perform activities of daily living
Scientific Reports 8, 10823 (2018).
J.M. Catalán, J.V. García-Pérez, A. Blanco, D. Martínez, L.D. Lledó, N. García-Aracil
Differences in Physiological Reactions Due to a Competitive Rehabilitation Game Modality.
Sensors, 21, 3681 (2021).
A. Bertomeu-Motos, S. Ezquerro, J.A. Barios, L.D. Lledó, S. Domingo, M. Nann, S. Martin, S.R. Soekadar & N. Garcia-Aracil
User activity recognition system to improve the performance of environmental control interfaces: a pilot study with patients.
Journal NeuroEngineering Rehabil 16, 10 (2019)..
A. Bertomeu-Motos, A. Blanco, F. Badesa, Juan A. Barios, Loredana Zollo & Nicolas Garcia-Aracil
Human arm joints reconstruction algorithm in rehabilitation therapies assisted by end-effector robotic devices.
Journal NeuroEngineering Rehabil 15, 10 (2018).
C. Lauretti, F. Cordella, A.L. Ciancio, E. Trigili, J.M. Catalan, F.J. Badesa, S. Crea, S. M. Pagliara, S. Sterzi, N. Vitiello, N. Garcia-Aracil, L. Zollo
Learning by Demonstration for Motion Planning of Upper-Limb Exoskeletons.
Frontiers Neurorobotics 12:5 (2018).
L.D. Lledó, J.A. Díez, A. Bertomeu-Motos, S. Ezquerro, F.J. Badesa, J.M. Sabater-Navarro and N. García-Aracil
A Comparative Analysis of 2D and 3D Tasks for Virtual Reality Therapies Based on Robotic-Assisted Neurorehabilitation for Post-stroke Patients.
Frontiers Aging Neuroscience 8:205 (2016).
AIDE – Adaptive Multimodal Interfaces to Assist Disabled People in Daily Activities. Funding agency: European Commission. Duration: 01/02/2015 – 31/05/2018.
PI: Nicolas García Arcil
Robotic system for sample extraction for subsequent laboratory analysis and diagnosis. Funding agency: Regional Ministry of Innovation, Universities, Science and Digital Society. Duration: 01/02/2020 – 31/12/2020.
PI: Nicolas García Arcil
Novel self-adaptive and multimodal robotic rehabilitation systems in controlled support environments. Funding agency: State Investigation Agency. Duration: 01/06/2020 – 31/05/2023.
PI: Nicolas García Arcil
HOMEREHAB – Development of Robotic Technology for Post-Stroke Home Tele-Rehabilitation. Funding agency: European Commission. Duration: 01/06/2016 – 30/01/2018.
PI: Nicolas García Arcil
Estimation of user state and intent and development of adaptive stimulation algorithms. Funding agency: Ministry of Science, Innovation and Universities. DPI2015-70415-C2-2-R. Duration: 01/01/2016 – 31/07/2019.
PI: Nicolas García Arcil
- U201931280. INTERCONNECTABLE ROBOTIC DEVICE FOR LIMB REHABILITATION
Nicolas García Aracil; José María Catalan Orts; José Vicente García Perez; Jorge Antonio Diez Pomares; Luis Daniel Lledo Perez; Andrea Blanco Ivorra; Arturo Bertomeu Motos.
Spain. 24/07/2019.
Miguel Hernández University of Elche.
Licensed to iDRhA
- P201930231. WEARABLE ROBOTIC SYSTEM FOR WRIST AND FOREARM MOVEMENT CONTROL
Nicolas García Aracil; Andrea Blanco; David Lopez; Jorge Antonio Diez; Jose María Catalan; José Vicente Garcia; Luis Daniel Lledo; Arturo Bertomeu; Jose María Sabater.
Spain. 13/03/2019.
Miguel Hernández University of Elche.
- PCT/ES2009/070305. ROBOTIC ARM FOR CONTROLLING ARM MOVEMENT
Sabater Navarro; Jose María; Fernández Jover; Eduardo; Garcia Aracil; Nicolas M.; Azorin Poveda; Jose María; Perez Vidal Carlos.
Spain. 05/08/2018.
Miguel Hernández University of Elche.
Licensed to INSTEAD TECHNOLOGIES
- ES201400643. MODULAR AND SELF-ADAPTIVE ROBOTIC DEVICE FOR HAND REHABILITATION AND PROCEDURE OF USE
Nicolas García Aracil; Jorge Antonio Diez Pomares; Jose María Sabater Navarro; Eduardo Fernández Jover
Spain. 02/11/2016.
Miguel Hernández University of Elche.
Licensed to iDRhA
- P202130072 SYSTEM AND METHOD FOR THE EVALUATION OF SPECIFIC JOINT MOVEMENTS OF THE HUMAN BODY.
Nicolas García Aracil; José María Catalan Orts; José Vicente García Perez; Jorge Antonio Diez Pomares; Luis Daniel Lledo Perez; Andrea Blanco Ivorra; Arturo Bertomeu Motos.
Spain. 29/01/2021
Miguel Hernández University of Elche.
- UMH News: https://www.youtube.com/watch?v=nOEFl7RwroQ
- Horizon Magazine: https://horizon-magazine.eu/article/robotic-arms-and-temporary-motorisation-next-generation-wheelchairs.html#.XJtz85CeoDI.twitter
- CORDIS: https://cordis.europa.eu/article/id/241028-daily-chores-made-easy-with-the-right-aide
- RTVE, “La cuarta revolución – Episodio 2”: https://www.rtve.es/alacarta/videos/la-cuarta-revolucion/cuarta-revolucion-episodio-2/5486892/
- PHYS.org: https://phys.org/news/2018-07-robotic-exoskeleton-disabled-people.html
- Las Provincias: https://www.lasprovincias.es/politica/exoesqueleto-devuelve-movilidad-5806156918001-20180706120714-vi.html
- Noticias Cuatro: https://www.youtube.com/watch?v=srZUNtVW5vU
- RTVE, “Informativo Comunidad Valenciana” (min 15:25 – 17:00): https://www.rtve.es/alacarta/videos/linformatiu-comunitat-valenciana/linformatiu-comunitat-valenciana-05-07-18/4654805/
- Antena3.com: https://www.antena3.com/noticias/ciencia/crean-exoesqueleto-robotico-que-facilitara-personas-discapacidad-poder-comer-beber_201807055b3dec870cf24fdcf8277eac.html
ExIF Project:
- Información Newspaper: https://www.informacion.es/elche/2020/10/25/exoesqueleto-creado-umh-aumenta-capacidad-20560257.html
- Información Newspaper: https://www.informacion.es/alicante/2019/07/13/robotica-provincia-exoesqueletos-umh-profesores-5368994.html
Covid_Robot Project:
- Información Newspaper: https://www.informacion.es/elche/2020/12/22/umh-presenta-robot-capaz-muestras-26650818.html
- Economía 3 Newspaper: https://economia3.com/2020/05/17/264544-la-umh-desarrolla-un-robot-para-extraer-muestras-que-evite-contagios-en-sanitarios/
- TVE, “España Directo” (min 3:55 – 5:28): https://www.rtve.es/alacarta/videos/espana-directo/29-12-20/5748479/
- UMH Radio News: https://www.youtube.com/watch?v=g7y7a7nd540
- TeleElx: https://www.youtube.com/watch?v=ugGxg-rppsk
- El Español: https://www.elespanol.com/invertia/disruptores-innovadores/innovadores/centros-tecnologicos/20201223/robot-anti-covid-19-capaz-hacer-pcr-dia/545446504_0.html
- Digis Mak: https://digismak.com/the-umh-of-elche-presents-a-robot-capable-of-taking-samples-to-test-for-coronavirus/
- Alicanteplaza Newspaper: https://alicanteplaza.es/aiju-desarrolla-aplicaciones-de-robotica-movil-y-vision-3d-para-acabado-de-piezas-plasticas
- Cadena SER: https://cadenaser.com/emisora/2020/12/22/radio_elche/1608645471_100880.html
- La Vanguardia: https://www.lavanguardia.com/vida/20201222/6142994/umh-desarrolla-robot-capaz-tomar-muestras-realizar-test-pcr.html
- Europa Press: https://www.europapress.es/comunitat-valenciana/noticia-umh-presenta-robot-capaz-tomar-muestras-realizar-pcr-20201222185354.html
- Onda Cero: https://www.ondacero.es/emisoras/comunidad-valenciana/elche/noticias/instituto-bioingenieria-universidad-miguel-hernandez-elche-disena-robot-toma-muestras-pcr_202012225fe21ca33005ce0001365987.html