
Robótica e Inteligencia Artificial
| Responsable | Nicolas Garcia Aracil |

RESUMEN DE LA INVESTIGACIÓN
El grupo de Robótica e Inteligencia Artificial de la Universidad Miguel Hernández de Elche es un grupo multidisciplinar formado por especialistas en diversas disciplinas como medicina, ingeniería, informática, fisioterapia, terapia ocupacional, etc. El carácter distintivo del grupo radica en la contribución sinérgica de todos sus miembros para poder afrontar con garantías de éxito el estudio de las complejas interacciones entre sistemas vivos y sistemas artificiales. Nuestros principales objetivos se centran en: 1) el diseño y desarrollo de novedosos sistemas avanzados de rehabilitación robótica que mejoren la recuperación motora y cognitiva de personas que hayan sufrido daño cerebral adquirido; 2) desarrollo de sistemas robóticos que asistan a persona mayores o personas con capacidades diferentes en la realización de actividades de la vida diaria; y 3) la aplicación de los desarrollos realizados en robótica e inteligencia artificial a otros ámbitos, como por ejemplo, la industria, la medicina, el sector servicios, etc.

Prototipo final del proyecto Europeo AIDE
LÍNEAS DE INVESTIGACIÓN
Línea 1: Robótica de rehabilitación
Diseño, desarrollo y control de dispositivos robóticos para la rehabilitación de pacientes con pérdida de movilidad por diferentes patologías. Además, dentro de esta línea de investigación se desarrollan y prueban novedosos algoritmos de inteligencia artificial para adaptar la terapia a las necesidades del paciente.

Plataforma robótica de rehabilitación Rubidium
Línea 2: Robótica asistencial
Investigación y desarrollo de nuevas aplicaciones de dispositivos robóticos de asistencia en el entorno doméstico para ayudar a personas mayores o discapacitadas. En esta línea, exploraremos el uso de este asistente robótico también en otros entornos.

La plataforma robótica TIAgo en un entorno doméstico simulado
Línea 3: Interfaces multimodales
Estos sistemas consisten en una combinación de diferentes tecnologías como la robótica, la realidad extendida, virtual y aumentada, la inteligencia artificial y los sensores para medir la respuesta fisiológica del usuario. Las interfaces multimodales permiten asistir al usuario proporcionándole más información o guía, pero también pueden ayudar a los pacientes durante la terapia.
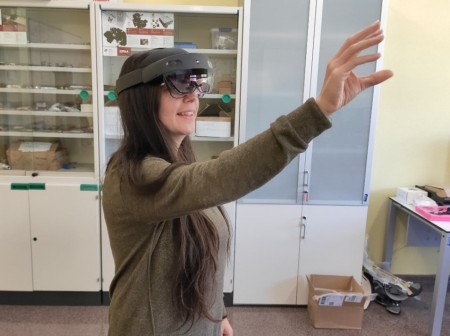
User operating the multimodal interface through the mixed reality Microsoft Hololens
Línea 4: Exoesqueletos robóticos
Diseño y fabricación de exoesqueletos robóticos para tareas industriales, de rehabilitación o de asistencia.


Exoesqueleto del miembro superior
Línea 5: Tecnologías Médicas
Diseño de sistemas tecnológicos para la medicina que faciliten la optimización de los procesos, la protección de los profesionales sanitarios y el apoyo en las pruebas médicas. Como ejemplo, el equipo ha desarrollado un sistema robotizado de extracción de muestras para su posterior análisis y diagnóstico en el laboratorio (PCR).
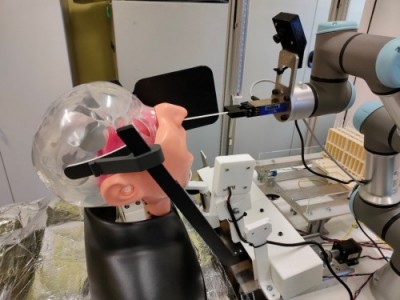
Pruebas del sistema robótico de extracción de muestras

J.A. Diez, V. Santamaria, M.I. Khan, J.M. Catalán, N. Garcia-Aracil, S.K. Agrawal
Exploring New Potential Applications for Hand Exoskeletons: Power Grip to Assist Human Standing
Sensors MDPI. 21(1):30 (2021).
M. Nann, F. Cordella, E. Trigili, C. Lauretti, M. Bravi, S. Miccinilli, J. M. Catalan, F. J. Badesa, S. Crea, F. Bressi, N. Garcia-Aracil, N. Vitiello, L. Zollo, S. R. Soekadar
Restoring Activities of Daily Living Using an EEG/EOG-Controlled Semiautonomous and Mobile Whole-Arm Exoskeleton in Chronic Stroke
IEEE Systems Journal (2020.
A. Blanco, J.M. Catalan, J.A. Díez, J.V. García, E. Lobato, N. Garcia-Aracil
Electromyography Assessment of the Assistance Provided by an Upper-Limb Exoskeleton in Maintenance Tasks
Sensors MDPI. 19-3391, pp.1-20 (2019).
J. A. Barios, S. Ezquerro, A. Bertomeu-Motos, M. Nann, F. J. Badesa, E. Fernandez, S. R. Soekadar, N. Garcia-Aracil
Synchronization of Slow Cortical Rhythms During Motor Imagery-Based Brain-Machine Interface Control
International Journal of Neural Systems. World Scientific. 29-5 (2019).
S. Crea, M. Nann, E. Trigili, F. Cordella, A. Baldoni, F. Javier Badesa, J. Ma. Catalán, L. Zollo, N. Vitiello, N. Garcia Aracil, S. R. Soekadar
Feasibility and safety of shared EEG/EOG and vision-guided autonomous whole-arm exoskeleton control to perform activities of daily living
Scientific Reports 8, 10823 (2018).
J.M. Catalán, J.V. García-Pérez, A. Blanco, D. Martínez, L.D. Lledó, N. García-Aracil
Differences in Physiological Reactions Due to a Competitive Rehabilitation Game Modality.
Sensors, 21, 3681 (2021).
A. Bertomeu-Motos, S. Ezquerro, J.A. Barios, L.D. Lledó, S. Domingo, M. Nann, S. Martin, S.R. Soekadar & N. Garcia-Aracil
User activity recognition system to improve the performance of environmental control interfaces: a pilot study with patients.
Journal NeuroEngineering Rehabil 16, 10 (2019)..
A. Bertomeu-Motos, A. Blanco, F. Badesa, Juan A. Barios, Loredana Zollo & Nicolas Garcia-Aracil
Human arm joints reconstruction algorithm in rehabilitation therapies assisted by end-effector robotic devices.
Journal NeuroEngineering Rehabil 15, 10 (2018).
C. Lauretti, F. Cordella, A.L. Ciancio, E. Trigili, J.M. Catalan, F.J. Badesa, S. Crea, S. M. Pagliara, S. Sterzi, N. Vitiello, N. Garcia-Aracil, L. Zollo
Learning by Demonstration for Motion Planning of Upper-Limb Exoskeletons.
Frontiers Neurorobotics 12:5 (2018).
L.D. Lledó, J.A. Díez, A. Bertomeu-Motos, S. Ezquerro, F.J. Badesa, J.M. Sabater-Navarro and N. García-Aracil
A Comparative Analysis of 2D and 3D Tasks for Virtual Reality Therapies Based on Robotic-Assisted Neurorehabilitation for Post-stroke Patients.
Frontiers Aging Neuroscience 8:205 (2016).
AIDE – Interfaces Multimodales Adaptativas para Asistir a las Personas con Discapacidad en las Actividades Diarias. Agencia de financiación: Comisión Europea. Vigencia: 01/02/2015 – 31/05/2018.
PI: Nicolas García Arcil
Sistema robotizado de extracción de muestras para su posterior análisis y diagnóstico en laboratorio. Agencia de financiación: Conselleria de innovacion, universidades, ciencia y sociedad digital. Vigencia: 01/02/2020 – 31/12/2020.
PI: Nicolas García Arcil
Novedosos sistemas robóticos de rehabilitación autoadaptativos y multimodales en entornos de apoyo controlados. Agencia de financiación: Agencia estatal de investigacion. Vigencia: 01/06/2020 – 31/05/2023.
PI: Nicolas García Arcil
HOMEREHAB – Desarrollo de Tecnología Robótica para la Tele-Rehabilitación Domiciliaria Post-Impacto. Agencia de financiación: Comisión Europea. Vigencia: 01/06/2016 – 30/01/2018.
PI: Nicolas García Arcil
Estimación del estado e intención del usuario y desarrollo de algoritmos adaptativos de estimulación. Agencia de financiación: Ministerio de Ciencia, Innovacion y Universidades. DPI2015-70415-C2-2-R. Vigencia: 01/01/2016 – 31/07/2019.
PI: Nicolas García Arcil
- U201931280. DISPOSITIVO ROBÓTICO INTERCONECTABLE PARA REHABILITACIÓN DE EXTREMIDADES
Nicolas García Aracil; José María Catalan Orts; José Vicente García Perez; Jorge Antonio Diez Pomares; Luis Daniel Lledo Perez; Andrea Blanco Ivorra; Arturo Bertomeu Motos.
España. 24/07/2019.
Universidad Miguel Hernández de Elche.
Licenciada a iDRhA
- P201930231. SISTEMA ROBOTIZADO VESTIBLE PARA EL CONTROL DE LOS MOVIMIENTOS DE LA MUÑECA Y DEL ANTEBRAZO
Nicolas García Aracil; Andrea Blanco; David Lopez; Jorge Antonio Diez; Jose María Catalan; José Vicente Garcia; Luis Daniel Lledo; Arturo Bertomeu; Jose María Sabater.
España. 13/03/2019.
Universidad Miguel Hernández de Elche.
- PCT/ES2009/070305. BRAZO ROBÓTICO PARA CONTROLAR EL MOVIMIENTO DEL BRAZO
Sabater Navarro; Jose María; Fernández Jover; Eduardo; Garcia Aracil; Nicolas M.; Azorin Poveda; Jose María; Perez Vidal Carlos.
España. 05/08/2018.
Universidad Miguel Hernández de Elche.
Licenciada a INSTEAD TECHNOLOGIES
- ES201400643. MODULAR AND SELF-ADAPTIVE ROBOTIC DEVICE FOR HAND REHABILITATION AND PROCEDURE OF USE
Nicolas García Aracil; Jorge Antonio Diez Pomares; Jose María Sabater Navarro; Eduardo Fernández Jover
España. 02/11/2016.
Universidad Miguel Hernández de Elche.
Licenciada a iDRhA
- P202130072 SISTEMA Y MÉTODO PARA LA EVALUACIÓN DE MOVIMIENTOS ARTICULARES ESPECÍFICOS DEL CUERPO HUMANO
Nicolas García Aracil; José María Catalan Orts; José Vicente García Perez; Jorge Antonio Diez Pomares; Luis Daniel Lledo Perez; Andrea Blanco Ivorra; Arturo Bertomeu Motos.
España. 29/01/2021
Universidad Miguel Hernández de Elche.
- Noticias UMH: https://www.youtube.com/watch?v=nOEFl7RwroQ
- Horizon Magazine: https://horizon-magazine.eu/article/robotic-arms-and-temporary-motorisation-next-generation-wheelchairs.html#.XJtz85CeoDI.twitter
- CORDIS: https://cordis.europa.eu/article/id/241028-daily-chores-made-easy-with-the-right-aide
- RTVE, “La cuarta revolución – Episodio 2”: https://www.rtve.es/alacarta/videos/la-cuarta-revolucion/cuarta-revolucion-episodio-2/5486892/
- PHYS.org: https://phys.org/news/2018-07-robotic-exoskeleton-disabled-people.html
- Las Provincias: https://www.lasprovincias.es/politica/exoesqueleto-devuelve-movilidad-5806156918001-20180706120714-vi.html
- Noticias Cuatro: https://www.youtube.com/watch?v=srZUNtVW5vU
- RTVE, “Informativo Comunidad Valenciana” (min 15:25 – 17:00): https://www.rtve.es/alacarta/videos/linformatiu-comunitat-valenciana/linformatiu-comunitat-valenciana-05-07-18/4654805/
- Antena3.com: https://www.antena3.com/noticias/ciencia/crean-exoesqueleto-robotico-que-facilitara-personas-discapacidad-poder-comer-beber_201807055b3dec870cf24fdcf8277eac.html
Proyecto ExIF:
- Diario Información: https://www.informacion.es/elche/2020/10/25/exoesqueleto-creado-umh-aumenta-capacidad-20560257.html
- Diario Información: https://www.informacion.es/alicante/2019/07/13/robotica-provincia-exoesqueletos-umh-profesores-5368994.html
Proyecto Covid_Robot:
- Diario Información: https://www.informacion.es/elche/2020/12/22/umh-presenta-robot-capaz-muestras-26650818.html
- Diario Economía 3: https://economia3.com/2020/05/17/264544-la-umh-desarrolla-un-robot-para-extraer-muestras-que-evite-contagios-en-sanitarios/
- TVE, “España Directo” (min 3:55 – 5:28): https://www.rtve.es/alacarta/videos/espana-directo/29-12-20/5748479/
- Informativo Radio UMH: https://www.youtube.com/watch?v=g7y7a7nd540
- TeleElx: https://www.youtube.com/watch?v=ugGxg-rppsk
- El Español: https://www.elespanol.com/invertia/disruptores-innovadores/innovadores/centros-tecnologicos/20201223/robot-anti-covid-19-capaz-hacer-pcr-dia/545446504_0.html
- Digis Mak: https://digismak.com/the-umh-of-elche-presents-a-robot-capable-of-taking-samples-to-test-for-coronavirus/
- Diario alicanteplaza: https://alicanteplaza.es/aiju-desarrolla-aplicaciones-de-robotica-movil-y-vision-3d-para-acabado-de-piezas-plasticas
- Cadena SER: https://cadenaser.com/emisora/2020/12/22/radio_elche/1608645471_100880.html
- La Vanguardia: https://www.lavanguardia.com/vida/20201222/6142994/umh-desarrolla-robot-capaz-tomar-muestras-realizar-test-pcr.html
- Europa Press: https://www.europapress.es/comunitat-valenciana/noticia-umh-presenta-robot-capaz-tomar-muestras-realizar-pcr-20201222185354.html
- Onda Cero: https://www.ondacero.es/emisoras/comunidad-valenciana/elche/noticias/instituto-bioingenieria-universidad-miguel-hernandez-elche-disena-robot-toma-muestras-pcr_202012225fe21ca33005ce0001365987.html